- Nederland
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Hoe IoT-apparaten werken: architectuur, componenten en prestatiefactoren
Catalogus
Hoe een IoT-apparaat werkt
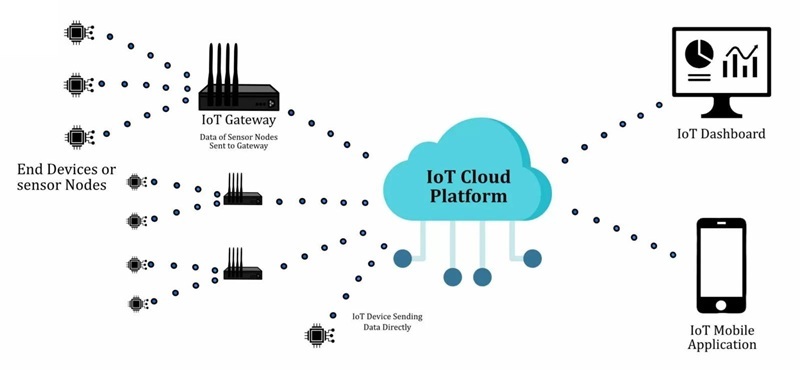
Een IoT-product is gemakkelijker te begrijpen wanneer het wordt behandeld als een gesloten, meetbare lus: het observeert de fysieke wereld, converteert wat het heeft geobserveerd in gegevens die de elektronica kan verwerken, verplaatst die gegevens naar een plaats waar ze kunnen worden geïnterpreteerd, en triggert vervolgens een reactie. Veel teams beginnen met het achtervolgen van “connectiviteit,” en dat is begrijpelijk, demonstraties zien er geweldig uit wanneer het dashboard in realtime wordt bijgewerkt, maar in het veld wordt het apparaat beoordeeld op de vraag of het zich dezelfde manier gedraagt op dag 3, dag 30 en dag 300.
De lus moet de dagelijkse beperkingen overleven die zich meestal op de slechtste momenten laten zien: beperkte energie, onvoorspelbare vertraging, interferentie, kostenplafonds, en evoluerende beveiligingsverwachtingen. Wanneer de lus is ontworpen met die beperkingen in gedachten, voelt het netwerk- en cloudlagen aan als een schone uitbreiding van het product in plaats van een bron van verrassingen en fragiele randgevallen.
Voelen: Een fysiek signaal omzetten in een elektrisch signaal
Aan de rand converteert een sensor een variabele uit de echte wereld in een elektrische weergave die het apparaat kan meten. De variabele kan milieu-, mechanische of elektrische aspecten zijn, en de taak van de sensor is om een signaal te creëren dat interpreteerbaar blijft gedurende temperatuurschommelingen, trillingen en installatievariabiliteit.
Veelvoorkomende gemeten variabelen uit de echte wereld:
• Temperatuur
• Trilling
• Druk
• Licht
• Beweging
• Stroom
• Gasconcentratie
De output van de sensor valt typisch in een van twee categorieën, en de keuze beïnvloedt alles stroomafwaarts (front-end ontwerp, sampling en geluidsverdraagzaamheid).
Veelvoorkomende sensoroutputtypes:
• Analoog: een continu variërende spanning of stroom
• Digitaal: gepakketete metingen via I²C/SPI/UART
Buiten laboratoriumomstandigheden hangt de nauwkeurigheid van de meting af van meer dan alleen de sensor zelf. Installatiefactoren zoals plaatsing, montagedruk, luchtstroom, nabijgelegen warmtebronnen, kabelrouting en mechanische koppeling kunnen de resultaten aanzienlijk beïnvloeden.
Meetfouten worden vaak veroorzaakt door installatieproblemen in plaats van sensorfouten. Flexibele montagemachines of resonante structuren kunnen gegevens vervormen en misleidende metingen creëren. Het behandelen van montage en mechanisch ontwerp als onderdeel van het meetsysteem helpt de tijd voor probleemoplossing te verminderen en verbetert de meetbetrouwbaarheid.
Conditie: Analoge front-end (AFE) en signaalhygiëne
Veel apparaten leiden ruwe sensoroutputs via een analoge front-end (AFE) voordat ze worden gedigitaliseerd. Deze fase vormt stilletjes de vraag of de rest van het systeem werkt met een stabiel, betrouwbaar signaal of met iets dat alleen onder gecontroleerde voorwaarden functioneert.
Typische AFE-functies:
• Biasing en referentiegeneratie om signalen binnen het geldige invoerbereik van de ADC te houden
• Versterking (instrumentatieversterkers, versterkingsstadia) om kleine signalen meetbaar te maken
• Filtering (low-pass, anti-alias filtering) om ruis te verminderen en misleidende hoge-frequentie-inhoud te beperken
• Bescherming (ESD-structuren, overspanningsbeveiliging, ingangsbeperkingen) om te overleven bij bedradingfouten en hantering
Echte operationele omgevingen introduceren vaak ruisbronnen zoals motoren, lange kabels, schakelregelaars en nabije radio's. Deze effecten kunnen meetfouten veroorzaken die willekeurig lijken totdat de bron is geïdentificeerd.
Goede aarding, juiste afscherming en basis anti-alias filtering verbeteren vaak de signaalkwaliteit effectiever dan alleen op complexe softwarefiltering te vertrouwen. Het aanpakken van ruis bij de bron levert meestal betrouwbaardere metingen en systeemprestaties op.
Converteer: ADC-monstername met opzettelijke afwegingen
Wanneer het signaal analoog is, converteert een ADC het naar digitale samples. De conversie zelf is eenvoudig; waar meestal ervaring voor nodig is, is het kiezen van monsterparameters die goed presteren onder echte batterij- en netwerkbeperkingen.
Twee monsterkeuzes die het gedrag downstream vormgeven:
• Monstersnelheid: snel genoeg om het fenomeen vast te leggen, maar niet zo snel dat het energie verbruikt en onnodige gegevens produceert
• Resolutie: fijn genoeg om betekenisvolle veranderingen te detecteren zonder ruis en drift in valse precisie om te zetten
Monstername werkt het best wanneer het als een systeembrede beslissing wordt behandeld in plaats van als een geïsoleerde specificatie. Oversampling kan stilletjes meer radioactiviteit afdwingen (en radio tijd is vaak wat eerst de batterij leegmaakt). Ondersampling kan korte, operationeel betekenisvolle gebeurtenissen, drukspikes, impacts, korte stilstanden missen, die gebruikers zich herinneren omdat het het moment was dat er iets misging.
Bereken: Microcontrollerverwerking, timing en randlogica
Een microcontroller (MCU) leest doorgaans sensorgegevens op een gedisciplineerd schema met behulp van timers, interrupts en DMA, zodat de timing van het apparaat consistent blijft, zelfs wanneer de firmware groeit. Consistente timing is een van die details die saai aanvoelt totdat de dag dat je een veldprobleem aan het debuggen bent en je je realiseert dat het “signaal” eigenlijk planningsjitter was.
Veelvoorkomende verwerkingsopdrachten aan de MCU-zijde:
• Digitale filtering (bewegend gemiddelde, mediaan, IIR) om jitter en uitschieters te verminderen
• Kalibratie en compensatie (offsetcorrectie, temperatuurcompensatie, linearisatie)
• Regelbeoordeling (drempels, hysterese, debouncing) om instabiele schakelingen te voorkomen
• Lichtgewicht randanalyses (kenmerkextractie, anomaliewaardering, compressie) om bandbreedte en cloudcomputing te verminderen
Een nuttige ontwerpmethode is om meetgegevens van beslissingslogica te scheiden. Sensormetingen kunnen fluctueren door normale fysieke omstandigheden, terwijl stabiel systeemgedrag kan worden behouden door middel van hysterese, timingvensters en state-machine controle. Deze scheiding helpt valse alarmen te verminderen, verbetert de systeemstabiliteit en voorkomt onjuiste foutindicaties wanneer tijdelijke meetvariaties optreden.
Niet elke beslissing profiteert van wachten op de cloud. Sommige acties zijn tijdgevoelig of gericht op schadepreventie, en het uitstellen ervan naar de cloud creëert vaak ongemakkelijke foutscenario's wanneer het netwerk traag of afwezig is.
Voorbeelden die doorgaans lokaal worden behandeld:
• Overstroomonderbreking; oververhittingsbeveiliging; motorstallingsdetectie
De cloud blinkt vaak uit wanneer de taak baat heeft bij een breder perspectief of langere tijdshorizonten.
Besluitvormingscategorieën aan de cloudzijde:
• Langetermijntrendanalyses en voorspellend onderhoud
• Cross-device correlatie
• Modelupdates en fleet-brede beleidswijzigingen
Een praktische regel waar teams vaak op uitkomen is eenvoudig: als een vertraagde opdracht plausibel kan leiden tot schade, moet het apparaat zichzelf eerst beschermen en daarna rapporteren. Die aanpak voelt meestal op een goede manier conservatief, vooral wanneer jij degene bent die bereikbaar is tijdens een netwerkstoring.
Communiceer: Radio/bekabelde verbindingen en toepassingsprotocollen
De communicatielaag verplaatst telemetrie naar een telefoon, gateway of cloud-eindpunt. Het selecteren van een verbindings technologie draait minder om wat trendy is en meer om wat aansluit bij de fysieke omgeving, het implementatiemodel en het stroombudget.
Veelvoorkomende connectiviteitsopties:
• Wi-Fi; BLE; Zigbee/Thread; mobiel (LTE-M/NB-IoT); Ethernet
Boven de linklaag gebruiken apparaten toepassingsprotocollen om berichten te structureren en te verzenden. Het juiste protocol hangt meestal af van of het product streaming telemetrie, configuratieworkflows of compatibiliteit met bestaande enterprise-structuren nodig heeft.
Veelvoorkomende toepassingsprotocollen:
• MQTT
• HTTP
Echte implementaties bieden zelden stabiele connectiviteit. Toegangspunten herstarten, gateways verdwijnen, mobiele dekking verschuift en interferentie komt en gaat. Apparaten voelen veel betrouwbaarder aan wanneer ze gegevens kunnen bufferen, voorzichtig kunnen proberen (niet op een manier die het netwerk DDOS't), en een duidelijk gedrag van de laatst bekende staat kunnen behouden, zodat het systeem begrijpelijk blijft wanneer de verbindingen imperfect zijn.
Telemetrie wordt doorgaans beschermd met TLS voor vertrouwelijkheid en integriteit. In veel producten is de eerste beveiligingswinst eenvoudigweg het inschakelen van versleuteling overal, maar duurzame beveiliging gaat verder door identiteit en updates beheersbaar te maken gedurende de volledige levensduur van het apparaat.
Veelvoorkomende beveiligingsbouwstenen:
• Unieke apparaatsidentiteiten en op certificaten gebaseerde authenticatie
• Veilige sleutelopslag (veilige elementen of MCU-vertrouwenszones)
• Ondertekende firmware en veilige opstart om de kans op ongeautoriseerde code-uitvoering te verminderen
Er is een patroon dat ervaren teams herkennen (vaak nadat ze het op de hardere manier hebben geleerd): beveiligingswerk is veel minder pijnlijk wanneer identiteit, sleutelbeheer en updatepaden vroeg in het ontwerp worden meegenomen. Wanneer die fundamenten vanaf het begin zijn gepland, blijft het apparaat meestal jaren bruikbaar, niet alleen tot de eerste grote veldupdate.
Cloud en Gegevens
In de cloud (of op een on-premise platform) worden gegevens opgeslagen, vaak in tijdreeksystemen, en vervolgens geaggregeerd en geanalyseerd. De cloud is waar ruwe telemetrie kan worden omgezet in uitkomsten waar iemand daadwerkelijk actie op zal ondernemen, of die iemand nu een gebruiker, een operator of een geautomatiseerde beleidsengine is.
Veelvoorkomende cloud-uitkomsten:
• Waarschuwingen (drempeloverschrijdingen, foutdetectie)
• Voorspellingen (overblijvende nuttige levensduur, driftdetectie)
• Dashboards (KPI's, trends, gezondheid van de vloot/apparaat)
• Controlecommando's (instelpunten, schema's, inschakel-/uitschakelacties)
De waarde van de cloud is het gemakkelijkst vast te leggen wanneer teams van tevoren beslissen welke beslissingen de gegevens moeten ondersteunen. Zonder die discipline heeft telemetrie de neiging om dure achtergrondruis te worden, betrouwbaar verzameld, plichtsgetrouw opgeslagen en vervolgens zelden met vertrouwen gebruikt.
Activeren: Commando's Veilig en Herhaalbaar Uitvoeren
Commando's die terug naar het apparaat worden gestuurd, drijven actuatoren aan, en dit deel van de lus is waar de hardware-reality luid wordt. Activering vereist stuurcircuit dat past bij de belasting, en het profiteert van vangrails die falen voorspelbaar maken in plaats van chaotisch.
Veelvoorkomende actuatoren:
• Motoren
• Kleppen
• Relais
• Verwarmers
• LED's
• Luidsprekers
Veelvoorkomende stuur- en beschermingselementen:
• MOSFET's; relais; H-bruggen; triacs (afhankelijk van belastingskenmerken)
• Flyback-diodes en snubbers (voor inductieve lasten)
• Stroommeting en thermale bescherming
• Toestandsverificatie wanneer beschikbaar (limietschakelaars, position feedback, elektrische handtekeningen)
Een betrouwbaarheid mindset die zich doorgaans uitbetaalt, is ervan uit te gaan dat activering de plek is waar risico's zich concentreren. Sensorschakelingen falen vaak stilletjes; actuatoren kunnen falen op manieren die gebruikers onmiddellijk opmerken. Eenvoudige beveiligingen, time-outs, interlocks, en sanity checks voorkomen vaak cascaderende problemen en zorgen ervoor dat het systeem betrouwbaarder aanvoelt tijdens de onvermijdelijke vreemde randgevallen.
De Lus Herhaalt
Deze cyclus van; computeren, communiceren, activeren herhaalt zich continu. Lokaal kan het in milliseconden draaien; een cloudronde kan seconden duren afhankelijk van het netwerk en de backendbelasting. Goede producten beschouwen timing en vermogen als ontwerpeisen die elke andere beslissing vormgeven, in plaats van als bijproducten die aan het einde geoptimaliseerd moeten worden.
Veelvoorkomende systeemstrategieën:
• Gebruik edge processing om onnodige transmissies te verminderen
• Batch en comprimeer telemetrie wanneer latentie-tolerantie het toestaat
• Slaap agressief en word voorspelbaar wakker op batterijgevoede apparaten
• Onderhoud “minimaal levensvatbaar gedrag” zelfs wanneer de cloud niet bereikbaar is
Een duurzaam IoT-apparaat wordt niet gedefinieerd door een enkel onderdeel. Het wordt gedefinieerd door hoe kalm de gehele lus zich gedraagt wanneer de realiteit afwijkt van het plan: lawaaierige signalen, intermitterende netwerken, verouderende hardware en onvoorspelbaar gebruikersgedrag. Ontwerpen met die omstandigheden in gedachten maakt vaak het verschil tussen een demo die één keer werkt en een product dat jaar na jaar zijn kalmte behoudt.
Elektronische Componenten op IoT-apparaatprestaties
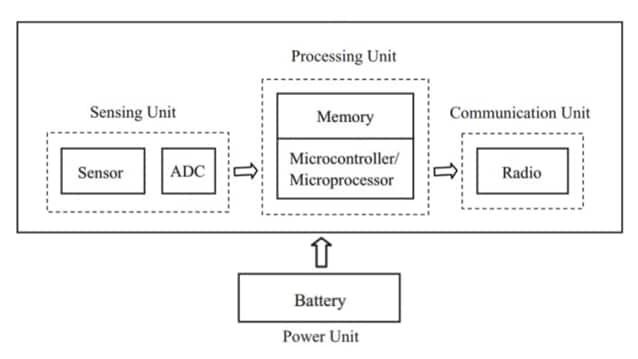
IoT-hardware voelt meestal alleen betrouwbaar aan wanneer sensorinvoer, verwerking, opslag, energievoorziening en connectiviteit zijn gevormd als één continu signaal- en stroompad.
Een sensorlezer blijft zelden zinvol als de referentiespanning verschuift, als de klok fluctuaties vertoont, of als de dataroute af en toe bytes verliest onder belasting. Een radioverbinding blijft zelden bruikbaar als de voeding tijdens transmissiepieken inzakt, als de oscillator ruisig is, of als de afhandeling van inloggegevens inconsistent is bij resets.
Veel teams leren dat de betrouwbaarheid vaak meer verbetert door de grenzen tussen blokken te verstrakken dan door een andere functie toe te voegen: voorspelbare rails, beperkte timing, gecontroleerde ruiskoppeling en een foutgedrag dat begrijpelijk is wanneer er iets kapot gaat.
Het ontwerpdoel is niet "perfecte onderdelen", maar interfaces die zich op dezelfde manier gedragen op een ontwikkelaarsbank, tijdens pilotimplementaties en maanden later in het veld.
Sensor
Sensoren converteren real-world omstandigheden naar elektrische signalen, maar het dagelijkse productgedrag wordt gevormd door details die klein kunnen lijken totdat veldgegevens ze oncomfortabel groot laten voelen.
Ruis, drift, bevestiging, luchtstroom, condensatie en kabelrouting hebben allemaal de neiging om een schone laboratoriumplot om te zetten in rommelige distributies waar de firmware mee moet overleven.
Bereik en resolutie moeten passen bij de beslissing die genomen wordt, niet bij een koppen specificatie. Te gevoelige configuraties versterken vaak ruis en drift, wat de kans op valse positieven verhoogt en stilletjes de rekentijd en radiotijd verhoogt. Een zo nauwkeurig mogelijk bereik kan verdedigbaar lijken tijdens ontwerpreview, maar het veldgedrag geeft vaak de voorkeur aan een iets breder bereik dat stabielere, beter interpreteerbare metingen produceert. Als een downstreammodel of drempel de gegevens toch gaat gladstrijken, kan het het aanvankelijk bevredigend lijken om de ruwe gevoeligheid te ver te duwen en daarna frustrerend wanneer ondersteuningsverzoeken binnenkomen.
Drift, veroudering en blootstelling bepalen of metingen geloofwaardig blijven na maanden of jaren.
Kalibratie werkt over het algemeen beter wanneer het wordt behandeld als een routine voor de levenscyclus in plaats van een enkele fabrieksritueel dat iedereen hoopt dat het eeuwig standhoudt.
• Fabriekskalibratie met opgeslagen coëfficiënten.
• Herkalibratie in het veld triggers (gepland, op gebeurtenis gebaseerd of technicus-ondersteund).
• Zelfcontrole-routines die uitbijters, clipping en verzadiging markeren.
Teams die gericht zijn op onderhoudbare producten zetten vaak bescheiden flash en rekencapaciteit apart voor kalibratiemetadata, traceerbaarheid en sanity checks, omdat het goedkoper is dan het uitleggen van inconsistente metingen na implementatie.
Het selecteren van de bemonsteringsfrequentie wordt meestal een onderhandeling tussen fysica, batterij en nut van de gegevens. Te langzaam bemonsteren loopt het risico op aliasing en gemiste gebeurtenissen, wat moeilijk te diagnosticeren kan zijn omdat de gegevens er nog steeds plausibel uitzien. Te snel bemonsteren verhoogt het stroomverbruik en de gegevenshoeveelheid, en het kan de illusie van beter inzicht creëren zonder materieel betere beslissingen te verbeteren.
Een patroon dat goed standhoudt is het vastleggen van het fenomeen met voldoende marge, vroeg filteren (analoog wanneer het echt helpt, digitaal wanneer het voldoende is) en downsamplen voor rapportage.
Dit levert vaak betere batterijresultaten op dan agressief bemonsteren en hopen dat cloudanalyses later compenseren.
Of een externe ADC gerechtvaardigd is, hangt meestal af van resolutie, ingangsimpedantie, referentiestabiliteit en ruisverdraagzaamheid. MCU-geïntegreerde ADC's presteren vaak goed voor bemonstering met gemiddelde resolutie, terwijl precisiesignalen vaak casual lay-out en referentie keuzes bestraffen.
• Selectie van low-noise referentie en routing van de referentie.
• Aarde-strategie, beschermsporen en controle van de retourroute.
• Afscherming en opzettelijke kabelrouting nabij connectors.
• ESD-bescherming geplaatst waar het daadwerkelijk de transiënte afsnijdt.
Kleine PCB-veranderingen kunnen meetbaar jitter verminderen en herhaalbaarheid verbeteren, vooral voor hoogimpedantiebronnen of laagniveau analoge signalen waar "bijna goed" zichtbaar onstabiel wordt in productiedata.
Microcontroller (MCU)
De MCU fungeert als het operationele centrum: het leest sensoren via GPIO, I²C, SPI en UART; voorbehandelt signalen; voert inferentie uit waar van toepassing; beheert vermogensmodi; en stuurt uitgangen aan.
Wanneer het gedrag van de MCU voorspelbaar is, voelt het hele apparaat kalm aan; wanneer dit niet het geval is, lijken fouten vaak willekeurig zelfs wanneer de oorzaak deterministisch is.
Stabiele firmware komt meestal voort uit expliciete toestandsmachines en timing die duidelijke grenzen heeft. Gebeurtenisgestuurde ontwerpen die gebruik maken van interrupts, DMA en timers overtreffen doorgaans polling loops op reactietijd en energie, vooral in apparaten die vaak in slaap gaan.
Wanneer teams willekeurige vastlopers beschrijven, is de schuldige vaak een van een paar herhaalplegers: onbeperkt werk binnen een interrupt, deadlock op de gedeelde bus, prioriteitsinversie of geheugenfragmentatie die nooit onder lange werkuren is getest.
RAM- en flashplanning werkt beter wanneer het omvat wat er gebeurt na de eerste demo-succes.
• Netwerkbuffer en TLS-overhead (inclusief worst-case handshakegedrag).
• Logging, metrics en crash dumps waar ingenieurs later om zullen vragen.
• OTA stagingruimte, plus metadata voor integriteitscontroles.
• Feature creep die voorspelbaar arriveert na feedback van de pilot.
Ondermaatse geheugen blijft vaak in het begin stil en wordt later pijnlijk, net wanneer diagnostiek en updateveiligheid de belangrijkste hulpmiddelen worden voor het beheersen van veldrisico's.
Apparaten die naar verwachting vertrouwd moeten worden, profiteren meestal van veilige opstart, beveiligde sleutelopslag, hardwarematige cryptografieversnelling en een echte willekeurige getallengenerator. Uit ervaring met implementatie blijkt dat beveiligingsretrofits ongemakkelijk aanvoelen omdat ze botsen met verzonden hardwarebeperkingen en langdurige referenties.
Het selecteren van een MCU (of het toevoegen van een beveiligd element) die sterke identiteit en gemeten opstart ondersteunt, vermindert vaak de hoeveelheid slimme software die nodig is om zwakke wortels van vertrouwen te compenseren.
Toegang voor SWD/JTAG en praktische testbaarheid beslissen doorgaans of vroege productie gecontroleerd of chaotisch is.
• SWD/JTAG toegangsplanning en vergrendelstrategie voor productie.
• Testpads en probe-vriendelijk ontwerp voor hoge volume fixtures.
• Power-rail meetpunten en meetbare knooppunten voor snelle triage.
Een kleine hoeveelheid testinfrastructuur kan teams weken van ongemakkelijke gissingen besparen wanneer de eerste grote batch hoekgevallen blootlegt die nooit zijn verschenen op handgebouwde prototypes.
Communicemodules
De communicatiemodule beïnvloedt meer dan alleen de linkbudget: het beïnvloedt provisioning, updategedrag, ondersteuningsworkflows en een verrassend aantal storingswijzen.
In batterijapparaten domineert het radio gedrag vaak het energieverbruik, zodat connectiviteitsbeslissingen vaak in het verborgene batterijlevensbeslissingen worden.
Selectie balanceert doorgaans bereik, latentie, doorvoer, topologie en energiebudget, met een eerlijke blik op operationele wrijving.
• BLE voor kortbereik, laag vermogen en smartphone-initialisatie.
• Wi‑Fi voor hogere doorvoer met hogere piekstroom en strengere eisen aan energie-integriteit.
• Thread/Zigbee voor mesh-netwerken en laagvermogen thuis/industrieel gebruik.
• LoRaWAN voor lange afstand, lage datasnelheden en strikte payload discipline.
• LTE‑M/NB‑IoT voor dekking op grote schaal met carrierbeperkingen en complexere provisioning.
Teams voelen vaak opluchting zodra ze toegeven dat “radio keuze” onafscheidelijk is van firmware retrystrategie, piekstroombehandeling en de geduld van de gebruiker tijdens de opzet.
Een sterke module kan toch teleurstellen als de antenne verkeerd is geplaatst, afgestemd door de behuizing, of blootgesteld aan ruis van de grond.
• Antenne keep-out zoning en gecontroleerde impedantierouting.
• Behuizingseffecten en gebruikshandinteractietests.
• Geëmitteerde emissiecontroles en vatbaarheidsproeven.
Wanneer de linkmarge dun is, kunnen firmware retries het symptoom een tijdlang verbergen, maar de batterijkosten stapelen zich op een manier op die operationele teams veel eerder opmerken dan ingenieurs in een laboratorium.
Connectiviteitsontwerp moet echte workflows overleven in plaats van ideale demos.
• Provisioning die gedeeltelijke storingen en veelvoorkomende gebruikersfouten verdraagt.
• Backoff en retry-logica die zelfopgelegde batterijontlading spiralen voorkomt.
• Roaminggedrag plus SIM/eSIM levenscyclusbeheer voor mobiele apparaten.
• OTA met authenticatie, rollback, en bandbreedte-bewuste planning.
OTA fungeert minder als een glanzende functie en meer als een langetermijnonderhoudskanaal; wanneer het casual wordt behandeld, worden apparaten vaak duur om te ondersteunen, zelfs als de eerste uitrol er goed uitziet.
Energiebeheer
Energieontwerp houdt het apparaat levend, herhaalbaar en saai, in de beste zin van het woord. Het beslaat regelingen, opladen, brandstofmeting, load switching, en beschermingskeuzes die zowel piekstroomgebeurtenissen als diepe-slaapverwachtingen moeten aankunnen.
Buck/boost/LDO-selectie profiteert van het evalueren van efficiëntie over het volledige laadbereik, niet alleen een enkel werkpunt. De quiescentestroom in de slaapstand beslist vaak of een product aan de batterijverwachtingen voldoet.
Radio's kunnen scherpe stroompieken creëren; bulkcapaciteit, lage-impedantierouting en stabiele controlesystemen beslissen meestal of het systeem tijdens verzendbursts in de lucht blijft. Veel mysterieuze resets kunnen worden teruggevoerd naar transiënte dalen in plaats van firmware, wat een nederige, maar nuttige les kan zijn tijdens de integratie.
Batterijlevensduur wordt doorgaans gewonnen tijdens de slaap, waar kleine lekken zich opstapelen tot meetbare verliezen.
• Diepe slaapconfiguratie met slechts de wake-bronnen die echt worden gebruikt.
• RTC of laagvermogen timers voor periodieke wake-ups.
• GPIO of sensorinterrupts voor gebeurtenisgedreven wake-ups.
• Power gating voor sensoren en randapparaten die geen continue bias nodig hebben.
Het meten van de huidige slaap in een vroeg stadium op echte hardware, en het behandelen van onverwachte microampère verhogingen als bugs, voorkomt meestal de langzame sluipende afname waarbij veel “bijna uit” blokken stilletjes de runtime verminderen.
De keuze voor de laad-IC hangt af van de chemicaliën, thermische limieten, regelgevende beperkingen en de verwachte omgeving. De keuze van een brandstofmeter moet de nauwkeurigheidseisen weergeven over temperatuur, belasting en veroudering. Voor buitentoepassingen of niet-geïsoleerde implementaties wordt het gedrag bij lage temperaturen vaak de bepalende factor voor ervaren kwaliteit, zodat conservatieve spanningsdrempels en eerlijke capaciteitsrapportage abrupte uitschakelingsklachten verminderen.
Overstroom, overvoltage, omgekeerde polariteit en ESD-gedrag moeten als routinematige bedrijfsomstandigheden worden beschouwd voor veel implementaties. Industriële omgevingen produceren vaak kabelontladingsgebeurtenissen en inductieve transiënten die eruit kunnen zien als “slechte geluk” tenzij het ontwerp hen vooraf verwacht. Geschikte klemmen, zekeringen, TVS-diodes, inschakelbesturing en isolatiebeslissingen bepalen vaak of een apparaat de eerste maand overleeft met een intacte reputatie.
Opslagcomponenten
Opslag bevat firmware, configuratie, certificaten en logs. De keuze tussen NOR/NAND-flash, EEPROM, FRAM, eMMC of microSD wordt meestal bepaald door duurzaamheid, prestaties, BOM-kosten en hoe pijnlijk een corrupte schrijfoperatie operationeel zou zijn.
Echte apparaten worden geconfronteerd met bruine-outs, watchdog-resets en gedeeltelijke schrijfacties.
• Checksums of CRC's voor configuratie en logs.
• Slijtage-nivellering of begrensde schrijffrequentie voor flash-gebaseerde media.
• Journaling of alleen-aanhangrecords voor gegevens die niet half geschreven kunnen worden.
Een veelvoorkomend operationeel patroon is ringbuffer-loggen met beperkte schrijfcapaciteit, wat het stille verbruik van duurzaamheid beperkt terwijl er nog genoeg kruimels overblijven om problemen in het veld te debuggen.
A/B-firmware slots plus geverifieerde opstart- en terugrol-logica bieden een praktisch veiligheidsnet tijdens onderbroken updates. Zonder deze waarborgen kan een enkel stroomverlies tijdens een update apparaten in het veld stranden. Producten die soepel schalen, beschouwen hersteldbaarheid doorgaans op hetzelfde niveau als verzendfuncties, omdat de ondersteuningskosten meestal de kwaliteit van het herstelverhaal volgen.
Certificaten en sleutels moeten worden opgeslagen met inachtneming van tamperbestendigheid en toegangscontrole, niet slechts ergens niet-vluchtig. Zelfs met veilige opslag verminderen plannen voor sleutelrotatie, intrekking en incidentrespons langdurige blootstelling wanneer een credential uitlekt of een vloot gedeeltelijk is gecompromitteerd.
Interfacecomponenten
LEDs, displays, knoppen, microfoons, camera's en biometrische sensoren beïnvloeden de bruikbaarheid, maar ze trekken ook stroom, EMI-risico en privacy-overwegingen aan. Een gebruikersinterface die consistent aanvoelt onder druk weerspiegelt vaak meer gedisciplineerd elektrisch ontwerp dan glans van de gebruikersinterface.
Knoppen hebben meestal debouncing en ESD-bescherming nodig om sporadische foute aflezingen te voorkomen.
Microfoons en camera's hebben doorgaans schone rails en zorgvuldige aarding nodig om intermitterende artefacten te vermijden die gebruikers interpreteren als “instabiel”.
• Scheiding van gevoelige analoge paden van hoge-stroomschakelingen en RF-paden.
• Terugpadplanning om ruiskoppeling te beperken.
• Shielding- en filtreringskeuzes die passen bij de behuizing en kabelstrategie.
Intermitterende UI-fouten worden vaak veroorzaakt door koppeling van radio's of motoren, en het kan verrassend bevredigend zijn om ze op te lossen met layout- en aarddiscipline in plaats van eindeloze firmware-oplossingen.
Apparaten gedragen zich voorspelbaarder wanneer ze een offline verhaal hebben dat niet afhankelijk is van de beschikbaarheid van het netwerk.
Duidelijke lokale feedback (eenduidige LED-toestanden en minimale, nauwkeurige foutsignalisatie) vermindert doorgaans de ondersteuningslast en voorkomt de frustratie van gebruikers die afkomstig is van stil falend gedrag.
Actuators
Actuators zetten controle-intentie om in beweging, warmte of kracht, en ze vereisen meestal interface-elektronica naast een directe MCU-pin. Omdat actuators interactie hebben met de fysieke wereld, zijn falen vaak zichtbaar, kostbaar en emotioneel escalerend voor gebruikers. Motoren, solenoïden, kleppen en relais hebben vaak MOSFET-trappen, H-bruggen of speciale driver-IC's nodig die zijn afgestemd op echte stromen en transiënten.
• Flyback-diodes of snubbers voor inductieve belastingen.
• Stroommeting voor stilstanddetectie en overbelastingsreactie.
• Thermisch ontwerp overwegingen voor continue of hoge-last belastingen.
Veldervaring toont vaak aan dat actuator-gerelateerde problemen een frequente oorzaak van uitval zijn, en conservatieve onderdering plus foutdetectie zorgt meestal voor een verbetering van het gedrag van de vloot op een manier die ondersteunings teams snel opmerken.
Een apparaat moet veilig blijven wanneer firmware crasht, de cloud niet bereikbaar is of opdrachten te laat aankomen.
• Watchdogs en resetstrategie afgestemd op veilige uitgangen.
• Standaard-veilige uitgangstoestanden gedefinieerd per actuator en per modus.
• Mechanische fail-safe posities waar de toepassing dit vereist.
De meest veerkrachtige ontwerpen beschouwen het verlies van connectiviteit als een normale werkmodus en definiëren precies wat de actuator tijdens die periode doet, zodat het gedrag voorspelbaar blijft, zelfs wanneer alles andere imperfect is.
Systeem Niveau Integratie
Hoog-impact verbeteringen komen vaak voort uit integratiepraktijken die het hele systeem dwingen om vroeg de waarheid te vertellen.
• Validatie van de energie-integriteit onder de ergste radio- en actuatorbelasting.
• Geluidbeheersing over analoge sensoren, schakelregelaars en hoge-stroomdrivers.
• Opstart-, update- en herstelstromen met meetbare toestanden en duidelijke observeerbaarheid.
• Milieu testen (temperatuur, luchtvochtigheid, trillingen) gekozen om te passen bij de werkelijke inzetomstandigheden.
Wanneer deze activiteiten worden behandeld als dagelijks ingenieurswerk in plaats van een ceremonie aan het einde, worden de componentkeuzes meestal minder dramatisch, en blijft het apparaatgedrag consistent van prototype tot massadeployment.
Conclusie
Succesvolle IoT-systemen vertrouwen op een complete en betrouwbare dataloop die sensing, signaalconditionering, verwerking, communicatie, beveiliging en energiebeheer omvat. Elke fase beïnvloedt de algehele prestaties, batterijlevensduur, nauwkeurigheid en gebruikerservaring. Door hardware, firmware, netwerken en operationele beperkingen in evenwicht te brengen, kunnen IoT-apparaten betrouwbare monitoring, controle en automatisering leveren in een breed scala van toepassingen.
Veelgestelde Vragen [FAQ]
1. Waarom falen veel IoT-projecten vanwege de meetkwaliteit in plaats van connectiviteitsproblemen?
Connectiviteit krijgt vaak de meeste aandacht tijdens de ontwikkeling omdat dashboards en cloud-integraties zeer zichtbaar zijn. Echter, onnauwkeurige metingen veroorzaakt door slechte sensorplaatsing, trillingen, luchtstromingen, thermische koppeling, ruis of installatiefouten kunnen het hele systeem ondermijnen. Als de oorspronkelijke gegevens onbetrouwbaar zijn, kunnen zelfs de meest geavanceerde analyses, cloudplatforms en communicatienetwerken geen betrouwbare beslissingen leveren. Succes op lange termijn voor IoT begint meestal met stabiele metingen in plaats van geavanceerde connectiviteitskenmerken.
2. Waarom moet de bevestiging van sensoren worden beschouwd als onderdeel van het sensorsysteem zelf?
Sensoren meten fysieke omstandigheden door hun interactie met de omringende omgeving. Bevestigingskracht, behuizingontwerp, kabelrouting, luchtstroom, trillingsoverdracht en thermisch contact kunnen allemaal beïnvloeden wat de sensor waarneemt. Een perfect gekalibreerde sensor kan toch misleidende metingen opleveren als deze slecht gemonteerd is. In veel implementaties dragen installatiegerelateerde fouten meer bij aan meetonzekerheid dan de specificaties van de sensor zelf, waardoor mechanische integratie een kritisch onderdeel van de algehele sensormetingenprestaties wordt.
3. Waarom is oversampling vaak een verborgen bedreiging voor de levensduur van de batterij in IoT-apparaten?
Gegevens vaker sampelen dan nodig verhoogt de verwerkingsbelasting, het geheugengebruik en de communicatie-activiteit. Aangezien draadloze transmissie vaak de grootste energieverbruiker is in batterijaangedreven IoT-producten, kan het verzamelen van te veel gegevens indirect het radiogebruik verhogen en de werkingstijd verkorten. Terwijl hoge samplingfrequenties de nauwkeurigheid lijken te verbeteren, creëren ze vaak grotere datasets zonder significante verbeteringen in de kwaliteit van de beslissingen te bieden. Effectieve samplingstrategieën balanceren de vereisten voor gebeurtenisdetectie tegen energieverbruik en rapportagebehoeften.
4. Waarom scheiden succesvolle IoT-apparaten meetlogica van besluitvormingslogica?
Rauwe sensorwaarden fluctueren van nature door ruis, omgevingsvariatie en normaal procesgedrag. Als elke meting rechtstreeks een actie triggert, kunnen systemen onstabiel worden en valse alarmen genereren. Door de meting te scheiden van de besluitvormingslogica met behulp van hysterese, toestandsmachines, filtering, timingvensters en validatieregels, kunnen apparaten responsief blijven terwijl ze onnodige reacties op tijdelijke fluctuaties vermijden. Deze aanpak verbetert de betrouwbaarheid en creëert een meer voorspelbaar systeemgedrag onder reële omstandigheden.
5. Waarom worden veel kritische IoT-beslissingen lokaal verwerkt in plaats van aan de cloud te worden gedelegeerd?
Cloudsysteem bieden waardevolle lange termijnanalyse, wagenparkbeheer en voorspellende inzichten, maar netwerklatency en storingen kunnen ze ongeschikt maken voor tijdgevoelige beschermingsfuncties. Gebeurtenissen zoals overstroomcondities, oververhitting, motorstoring of veiligheidsuitschakelingen vereisen vaak onmiddellijk actie. Wachten op cloudbevestiging kan leiden tot schade aan apparatuur of onveilige omstandigheden. Om deze reden worden kritische bescherming- en besluitvorming vaak aan de rand uitgevoerd terwijl cloudplatforms zich richten op monitoring en optimalisatie.
Gerelateerde blog
-
Hoeveel nullen in een miljoen, miljard, triljoen?
![Hoeveel nullen in een miljoen, miljard, triljoen?]()
2024/07/29
Million vertegenwoordigt 106, een gemakkelijk te begrijpen figuur in vergelijking met alledaagse items of jaarsalarissen. Miljard, gelijk aan 109, beg... -
IRLZ44N MOSFET -datasheet, circuit, equivalent, pinout
![IRLZ44N MOSFET -datasheet, circuit, equivalent, pinout]()
2024/08/28
De IRLZ44N is een veelgebruikte N-kanaalmower MOSFET.Bekend om zijn uitstekende schakelmogelijkheden, is het zeer geschikt voor tal van toepassingen, ... -
Batterijtemperatuur te laag, opladen gestopt.Hoe het op te lossen?
![Batterijtemperatuur te laag, opladen gestopt.Hoe het op te lossen?]()
2024/10/6
Batterij oplaadproblemen voor mobiele telefoons komen vaak voor, maar kunnen effectief worden beheerd.Temperatuur speelt een grote rol bij de batterij... -
BC547 Transistor uitgebreide gids
![BC547 Transistor uitgebreide gids]()
2024/07/4
De BC547 -transistor wordt vaak gebruikt in verschillende elektronische toepassingen, variërend van basissignaalversterkers tot complexe oscillatorci... -
Uitgebreide gids voor SCR (siliciumgestuurde gelijkrichter)
![Uitgebreide gids voor SCR (siliciumgestuurde gelijkrichter)]()
2024/04/22
Siliciumgestuurde gelijkrichters (SCR), of thyristors, spelen een cruciale rol in de elektronische technologie van de kracht vanwege hun prestaties en... -
LR621, SR621SW, 364, AG1 -batterij -equivalenten en vervangingen
![LR621, SR621SW, 364, AG1 -batterij -equivalenten en vervangingen]()
2024/07/15
LR621 en SR621SW -batterijen zijn gangbaar in compacte elektronische apparaten zoals horloges, klein speelgoed, rekenmachines en externe toetsen.Meerd... -
Een complete gids voor multiplexers en hun rol in digitale systemen
![Een complete gids voor multiplexers en hun rol in digitale systemen]()
2025/09/20
Multiplexers zijn componenten in digitale systemen, ontworpen om meerdere ingangssignalen te kanaliseren in een enkele uitgangsregel met behulp van bi... -
Fundamentals van op-amp circuits
![Fundamentals van op-amp circuits]()
2023/12/28
In de ingewikkelde wereld van elektronica leidt een reis naar zijn mysteries ons steevast naar een caleidoscoop van circuitcomponenten, zowel voortref... -
Vergelijking van NMOS- en PMOS -verschillen en toepassingen
![Vergelijking van NMOS- en PMOS -verschillen en toepassingen]()
2024/11/15
Inzicht in de verschillen tussen NMO's en PMOS -transistoren is belangrijk bij het ontwerpen van efficiënte circuits.NMOS (N-type metaal-oxide-halfge... -
CR2450 vs CR2032 Vergelijking: alles wat u moet weten
![CR2450 vs CR2032 Vergelijking: alles wat u moet weten]()
2025/09/15
Buttonbatterijen zoals CR2450 en CR2032 Voeren vele alledaagse elektronica, van horloges en afstandsbedieningen tot medische en industriële apparaten...










Hete delen
- CXD4213GG-T6
- PIC16F685-I/SO
- AT24C512CICI27
- S29GL064A90TFIR3
- T493A106K010AH6120
- N83C196KB12
- C3216JB1A336M160AB
- UMK105B7821KV-F
- MC-2D865101F1-DC2
- 1210AC202KAT1A
- HD6417145F50V
- GRM0225C1E2R0CDAEL
- CL10B104KA8NFNC
- ADV7604BBCZ-5
- AJ605-E1
- M38039FFHFP
- LMH1981MT
- SKM150GM12T4G
- 06033C102KAT2A
- C8051F960-A-GM
- M74HC240B1
- RT1206BRD074K7L
- LT5504EMS8#TRPBF
- MX29LV040TC-55R
- TIP35CW
- TS80002-QFNR
- M30620FCAFP#U5
- CSD95492QVM
- GRM21BR71E104KA01L
- C3216X5R2J223M130AA
- MC14099BFELG
- PIC18F13K22-E/ML
- 1808CC102JAT9A
- XC4008E-2PQ208C
- UPD78F0537DAGB-GAH-AX
- T491X157M016AT
- CC0402GRNPO9BN820
- LT1963EQ#PBF
- VE-B6M-CU-S
- VI-25L-IU
- HD64560F
- XC2VP7-FG456A
- LT1173CS8-12
- LT1461ACS8-3.3
- L2E1811D
- TC35168BF-001
- VI-B60-34
- BSS138-13-F
- UPD70320GJ
- T5CB5-6UK1